ĪŠĶF╝ū╣ż│╠ÖC(j©®)ąĄŠW(w©Żng)įŁäō(chu©żng)Ī┐╬ęéā│ŻęŖĄ─Ę┤ńP═┌Š“ÖC(j©®)▀M(j©¼n)ąą═┌Š“ū„śI(y©©)Ģr(sh©¬)�����Ż¼═©│ŻĢ■┐╝æ]ę╗éĆ(g©©)ģóöĄ(sh©┤)�Ż¼─ŪŠ═╩Ū═┌Š“╔ŅČ╚�ĪŻ└²╚ńŻ¼═┌£Ž�����ĪóŪÕ└ĒśČŅ^����Īó═┌Ąž╗∙Ą╚Ą╚ū„śI(y©©)Ģr(sh©¬)Č╝╩Ūę¬░┤ššę╗éĆ(g©©)ś╦(bi©Īo)£╩(zh©│n)Ą─╔ŅČ╚üĒ═┌Š“�Ż¼Š═▀Bčb▄ćę▓▒žĒÜ┐╝æ]═┌Š“╔ŅČ╚���Ż¼╚ń╣¹═╗╚╗═┌╠½╔Ņ╗“╩Ū╠½Ė▀����Ż¼Š═Ģ■ė░ĒæĄ╣▄ć�����Ż¼ķgĮėė░Ēæ╣żū„ą¦┬╩�ĪŻ╚ń╣¹ė÷ĄĮę¬Ū¾Š½Č╚Ė▀Ą─ū„śI(y©©)Ģr(sh©¬)Š═ų╗─▄═©▀^Ż¼āxŲ„üĒ▌oų·£y┴┐╔ŅČ╚┴╦�Ż¼ūŅ│ŻęŖĄ─Š═╩Ū╦«£╩(zh©│n)āx┴╦��ĪŻĄ½▓╗╩Ū├┐éĆ(g©©)╣żĄžČ╝Ģ■ėąāxŲ„£y┴┐����Ż¼╝┤╩╣ėąāxŲ„ę▓▓╗Ģ■Ģr(sh©¬)Ģr(sh©¬)£y┴┐ĪŻį┌ø]ėąāxŲ„Ą─Ģr(sh©¬)║“��Ż¼±{±éåTŠ═ų╗─▄═©▀^č█Š”┐┤üĒ╣└ėŗ(j©¼)╔ŅČ╚����Ż¼╦∙ęį╣└ėŗ(j©¼)╔ŅČ╚│╔┴╦═┌Š“ÖC(j©®)±{±éåTĄ─▒žą▐šnų«ę╗����Ż¼ėą║▄ČÓ“╦«ŲĮ”▓╗║├Ą─═┌Š“ÖC(j©®)±{±éåT┤¾Ė┼Š═╩Ū▀@ę╗šnø]ą▐║├�����ŻĪ
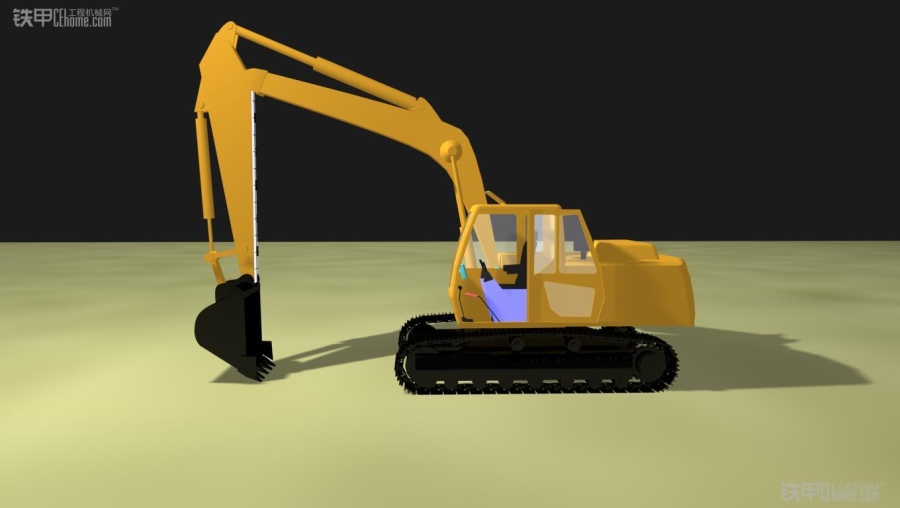
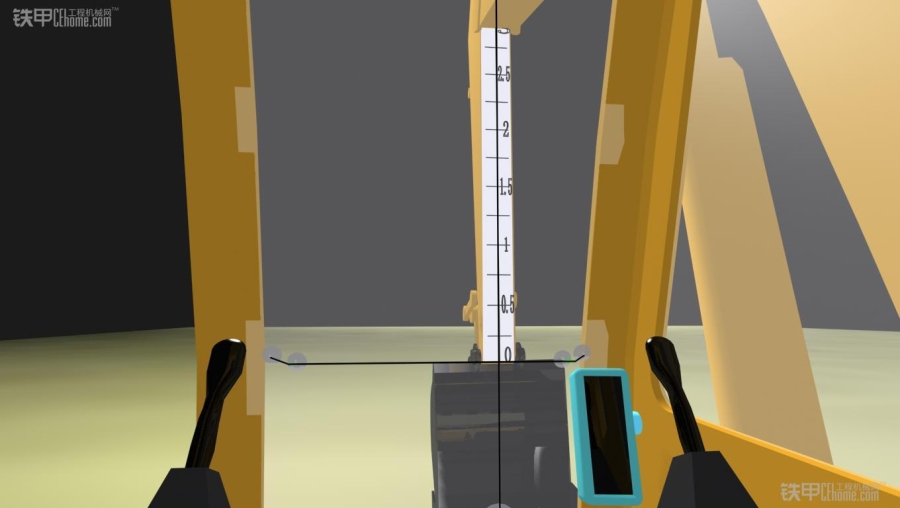
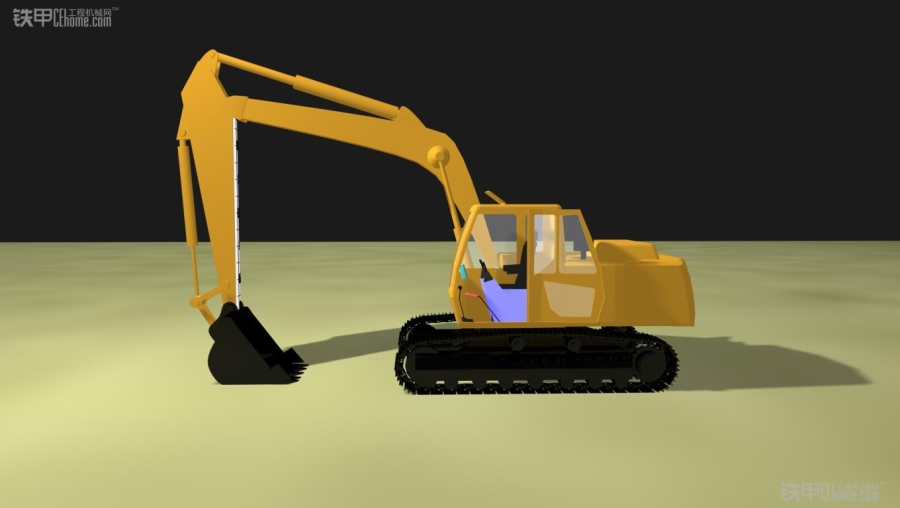
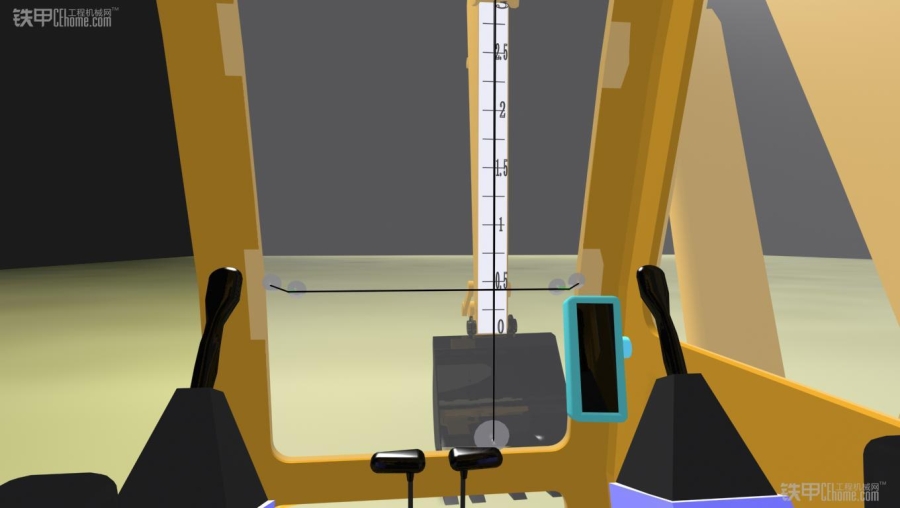
╬ęŠ═╩Ūę╗├¹═┌Š“ÖC(j©®)±{±éåT���Ż¼╬ęŠ═Įø(j©®ng)│Ż×ķ╔ŅČ╚╣└ėŗ(j©¼)Õe(cu©░)š`Č°¤®É└���Ż¼╬ęėXĄ├┐┐╚╦č█┐┤Ż¼šlę▓┤_▒Ż▓╗┴╦����Ż¼ę¬Ū¾═┌90└Õ├ūŠ═▓╗═┌1├ūŻ¼ę¬Ū¾═┌1├ū▓╗═┌1.2├ū�ĪŻ×ķ┴╦ĮŌøQ▀@éĆ(g©©)¤®É└╦∙ęį╬ę░l(f©Ī)├„┴╦ę╗éĆ(g©©)čbų├Ż¼╬ęėXĄ├╚ń╣¹┐╔ęį░č╦«£╩(zh©│n)āxĄ─įŁ└Ēų▒Įėė├į┌═┌Š“ÖC(j©®)╔Ž����Ż¼Š═─▄▀ģ═┌Š“▀ģ┐┤ĄĮ╔ŅČ╚öĄ(sh©┤)ō■(j©┤)┴╦Ż¼įO(sh©©)ėŗ(j©¼)įŁ└Ē╩Ū▀@śėĄ─Ż║į┌═┌Š“ÖC(j©®)Ą─ąĪ▒█Ż©ČĘŚUŻ®ā╚(n©©i)é╚(c©©)ę╗├µį÷╝ė┐╠Č╚│▀�����Ż¼(╚ńłD1╦∙╩Š)Ż¼į┌═┌Š“ÖC(j©®)±{±é╩ęĄ─Ū░▓Ż┴¦╔Žį÷╝ėę╗éĆ(g©©)╩«ūųČ©╬╗ū°ś╦(bi©Īo)���Ż¼Ż©╚ńłD2╦∙╩ŠŻ®�����Ż¼▀@éĆ(g©©)Č©╬╗ū°ś╦(bi©Īo)ė╔╬³▒P║═ŠĆĮM│╔����Ż¼ų▒Įė╬³ĖĮį┌▓Ż┴¦╔Ž���Ż¼±{±éåT═Ė▀^▓Ż┴¦╔ŽĄ─Č©╬╗ū°ś╦(bi©Īo)Š═─▄┐┤ĄĮąĪ▒█╔Ž┐╠Č╚│▀Ą─ŽÓæ¬(y©®ng)Ą─öĄ(sh©┤)ūų�ĪŻę▓įS─ŃĢ■å¢�����Ż¼▀@śėŠ═─▄┐┤ĄĮ═┌Š“╔ŅČ╚┴╦åß����Ż┐╩Ū▓╗╩Ū╠½║åå╬┴╦��Ż┐┐┐ūVåß�Ż┐«ö(d©Īng)╚╗ø]ėą▀@├┤║åå╬�����Ż¼▀@ų╗╩Ū┤¾ų┬Ą─įŁ└Ē�Ż¼▀Ćėą║▄ČÓ╝Ü(x©¼)╣Ø(ji©”)šf├„��Ż¼╬ęéāę╗³c(di©Żn)ę╗³c(di©Żn)üĒĮŌ╬÷�����ĪŻ
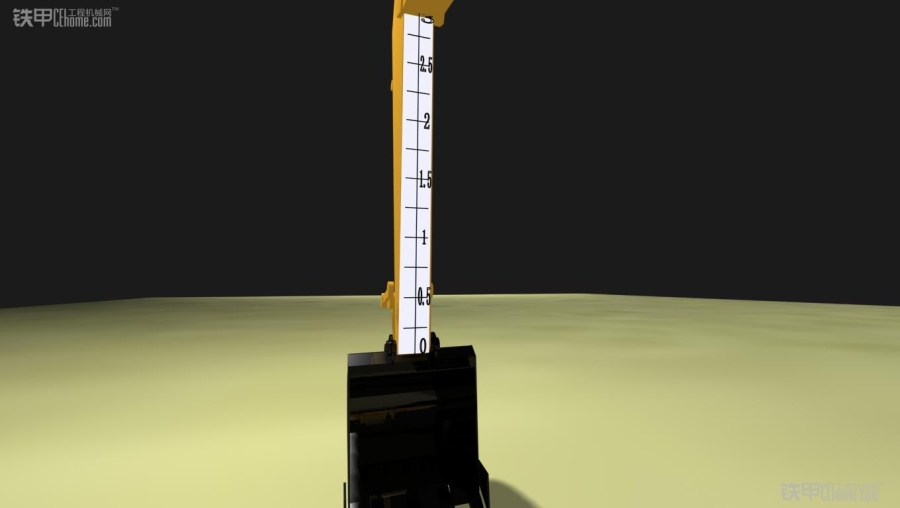
į┌═┌Š“ÖC(j©®)ąĪ▒█ā╚(n©©i)é╚(c©©)į÷╝ė┐╠Č╚│▀
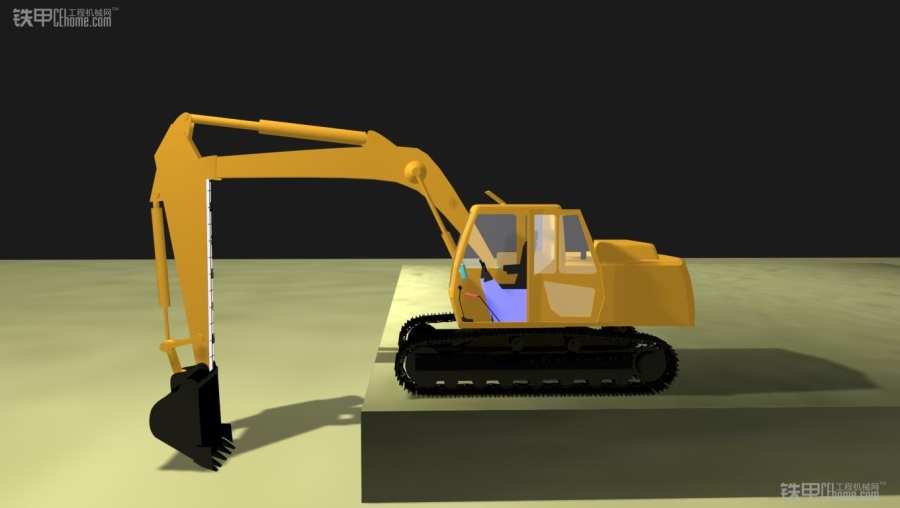
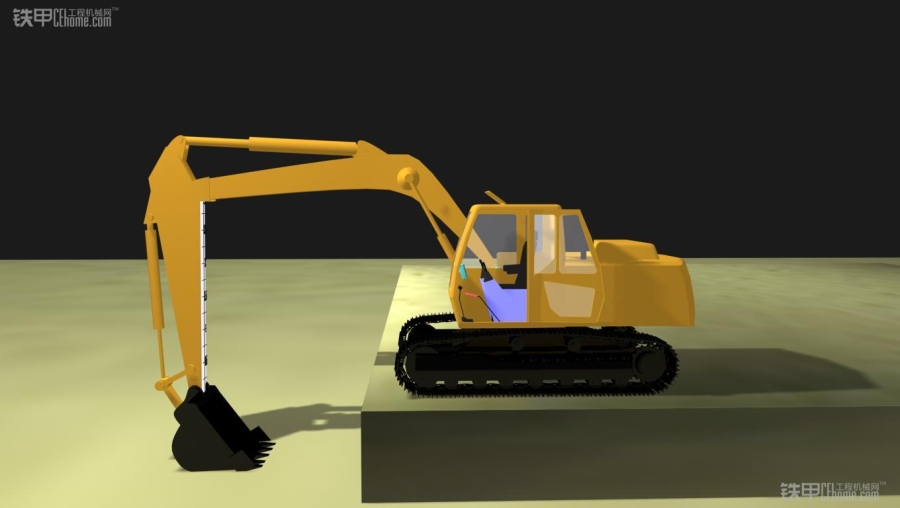
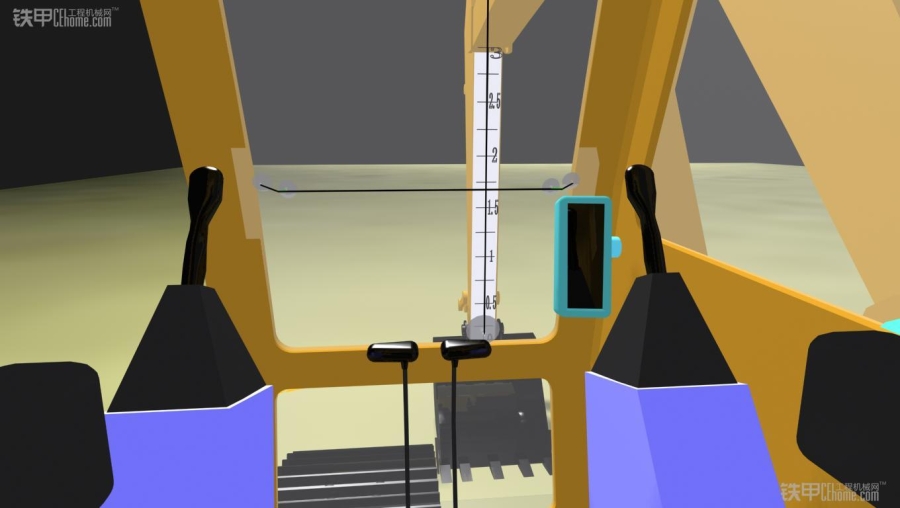
╩ūŽ╚ę¬═©▀^ąĪ▒█Ż©ČĘŚUŻ®üĒ£y┴┐╔ŅČ╚�Ż¼─ŪąĪ▒█Š═ŅÉ╦Ųė┌╦«£╩(zh©│n)āxĄ─ś╦(bi©Īo)│▀Ż¼ś╦(bi©Īo)│▀ę¬┤╣ų▒žQ┴ó▓┼─▄£y┴┐ĄĮ£╩(zh©│n)┤_Ą─╔ŅČ╚��Ż¼Ą½═┌Š“ÖC(j©®)╣żū„Ģr(sh©¬)�����Ż¼ąĪ▒█╩ŪŪ░║¾į┌▀\(y©┤n)äėĄ─����Ż¼į§śė▓┼─▄ų¬Ą└Ż¼ąĪ▒█║╬Ģr(sh©¬)╠Äė┌┤╣ų▒║╬Ģr(sh©¬)ėų▓╗╩Ū─ž�����Ż┐ŲõīŹ(sh©¬)ĮŌøQ▀@éĆ(g©©)å¢Ņ}║▄║åå╬Ż¼ė╔ė┌ąĪ▒█░³└©┤¾▒█Ż©äė▒█Ż®║═ńPČĘ�����Ż¼╩Ū╠Äė┌═┌Š“ÖC(j©®)±{±é╩ęĄ─ėęé╚(c©©)��Ż¼╦∙ęį±{±éåT╣żū„Ģr(sh©¬)Ą─č█Š”▓╗╩Ū╠Äė┌ąĪ▒█Ą─▀\(y©┤n)äėŲĮ├µā╚(n©©i)����Ż¼Č°╩Ūį┌ąĪ▒█▀\(y©┤n)äėŲĮ├µĄ─é╚(c©©)├µŻ¼╦∙ęį╬ęéāų╗ę¬į┌ąĪ▒█┐╠Č╚│▀Ą─ųąķgį÷╝ėę╗ŚlųąŠĆ���Ż¼į┘±{±é╩ęĄ─▓Ż┴¦╔Žė├╬³▒P╣╠Č©žQŽ“Ą─ę╗ŚlŠĆ�����Ż¼±{±éåTč█Š”╦∙─▄┐┤ĄĮā╔ŚlŠĆųž»BĢr(sh©¬)Š═╩Ū�����Ż¼ąĪ▒█Ą─ę╗éĆ(g©©)╣╠Č©╬╗ų├�����Ż¼┐╔ęį═©▀^š{(di©żo)š¹╬³▒PüĒįO(sh©©)Č©▀@éĆ(g©©)╣╠Č©╬╗ų├×ķ┤╣ų▒žQ┴ó�����ĪŻŻ©╚ńłD2���ĪółD3ĪółD4ī”▒╚╦∙╩ŠŻ®���Ż¼łD2╩ŪąĪ▒█╔ņ│÷│¼▀^┴╦┤╣ų▒╬╗ų├Ģr(sh©¬)��Ż¼łD4╩ŪąĪ▒█╩š╗ž│¼▀^┴╦┤╣ų▒╬╗ų├Ģr(sh©¬)��Ż¼ų╗ėąłD3╦∙╩Š�����Ż¼ā╔ŚlŠĆš²║├ųž»B����Ż¼šf├„┤╦Ģr(sh©¬)ąĪ▒█š²║├╠Äė┌┤╣ų▒╬╗ų├�ĪŻ
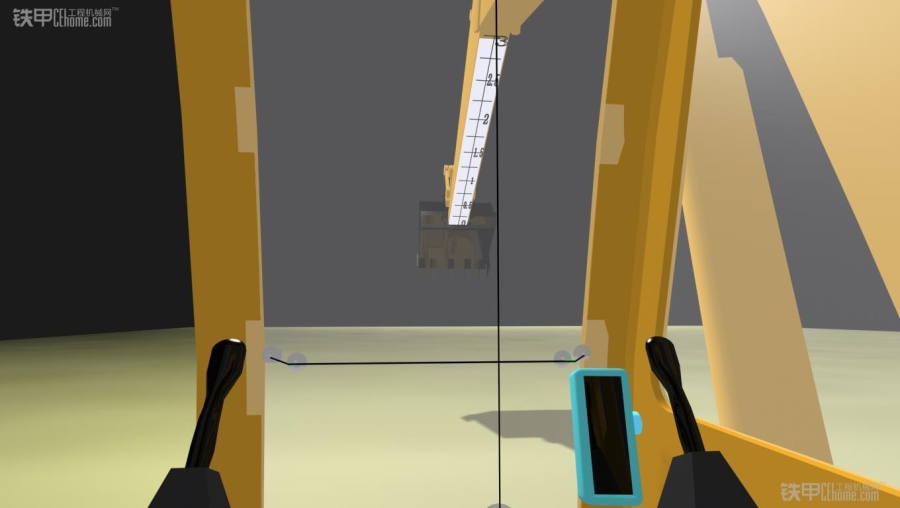
Ż©łD2Ż®ąĪ▒█╔ņ│÷│¼▀^┴╦┤╣ų▒╬╗ų├
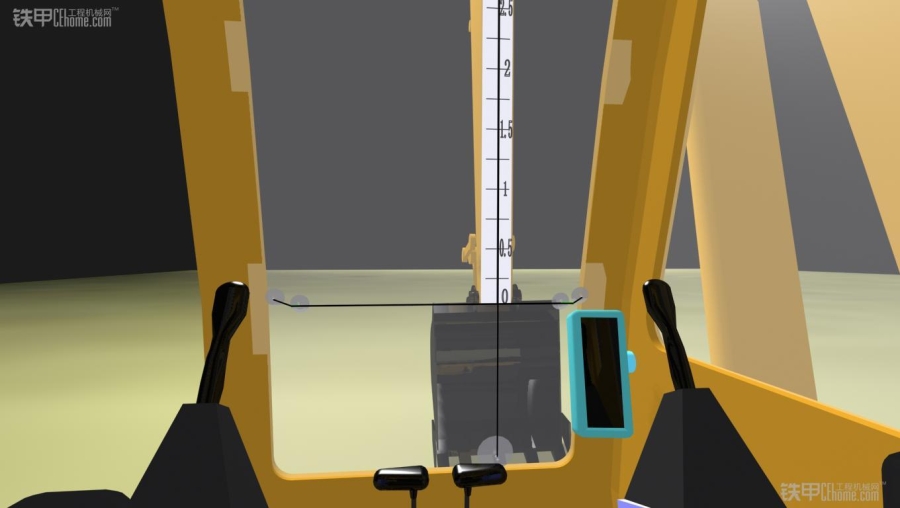
Ż©łD3Ż®ąĪ▒█║═┐╠Č╚ŠĆš²║├ųž║Ž
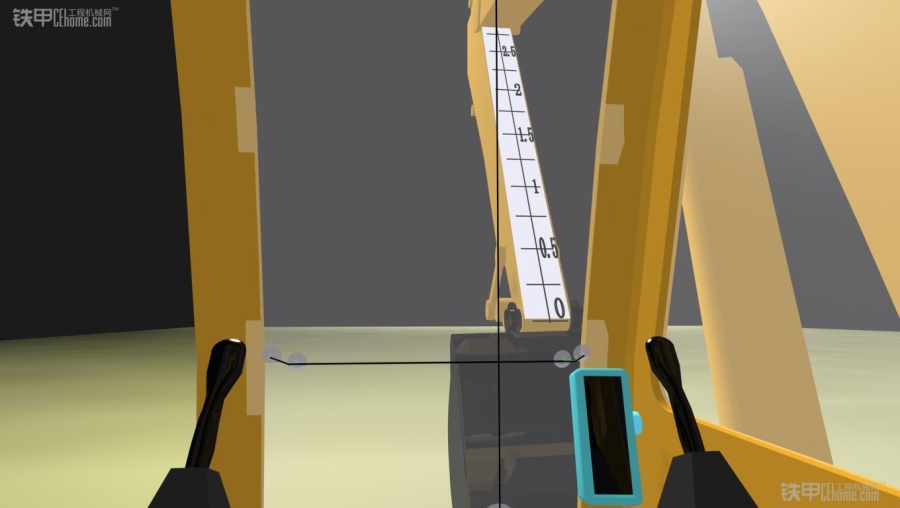
Ż©łD4Ż®ąĪ▒█╩š╗ž│¼▀^┴╦┤╣ų▒╬╗ų├
┤_Č©┴╦ąĪ▒█┤╣ų▒Ż¼─ŪĮėŽ┬üĒį§śėūx╚ĪöĄ(sh©┤)ųĄ─ž�Ż┐╚ń╣¹ę▓╩Ū║═┤_Č©ąĪ▒█┤╣ų▒╬╗ų├Ą─ĘĮĘ©ę╗śėŻ¼å╬┐┐į┌±{±é╩ę▓Ż┴¦╔Žį÷╝ėę╗ŚlÖMŽ“Ą─ŠĆŻ¼─Ū┐ŽČ©╩Ū▓╗ē“Ą─����Ż¼ę“?y©żn)ķ±{±éåTĄ──X┤³▓╗┐╔─▄╩╝ĮKį┌ę╗éĆ(g©©)╬╗ų├▓╗äėŻ¼╔ŽŽ┬╔įėą╗╬äė��Ż¼öĄ(sh©┤)ųĄŠ═▓╗£╩(zh©│n)┴╦����ĪŻĮŌøQ▀@éĆ(g©©)å¢Ņ}ę▓║▄║åå╬Ż¼Š═╩ŪČÓį÷╝ėę╗ŚlÖMŽ“Ą─Č©╬╗ŠĆ�Ż¼ā╔ŚlŠĆė╔ų¦ŚUō╬ķ_ę╗Č©Ą─ŠÓļxŻ¼ā╔éĆ(g©©)³c(di©Żn)┤_Č©ę╗ŚlŠĆ���Ż¼▀@śėė╔±{±éåTč█Š”┐┤ĄĮĄ─ā╔ŚlÖMŽ“Č©╬╗ŠĆųž»BĢr(sh©¬)ī”æ¬(y©®ng)Ą─ąĪ▒█┐╠Č╚│▀öĄ(sh©┤)ųĄ�����Ż¼Š═╩Ū╬ęéāąĶꬥ─öĄ(sh©┤)ųĄ��ĪŻ

ČÓį÷╝ėę╗ŚlÖMŽ“Ą─Č©╬╗ŠĆĘĮ▒Ńūx╚ĪöĄ(sh©┤)ųĄ
▀Ćėąę╗éĆ(g©©)å¢Ņ}Š═╩Ū�Ż¼╦«£╩(zh©│n)āxį┌╣żū„Ū░�����Ż¼Č╝ꬎ╚š{(di©żo)įćĄĮ╦«ŲĮ╬╗ų├Ż¼─Ū▓╔ė├▀@éĆ(g©©)čbų├╩Ū▓╗╩Ūę▓ę¬╩╣═┌Š“ÖC(j©®)Ą─┬─Ħ═Żį┌ę╗éĆ(g©©)╦«ŲĮĄ─ŲĮ├µ╔Ž─ž���Ż┐─ŪžM▓╗╩Ū║▄ļy▀_(d©ó)ĄĮę¬Ū¾Ż┐╗ž┤▀@éĆ(g©©)å¢Ņ}Ą─┤░Ė╩Ū��Ż¼▓╗ąĶę¬�����ĪŻę“?y©żn)ķ┼c╦«£╩(zh©│n)āx┬įėą▓╗═¼Ą─╩Ū�Ż¼▀@╠ūčbų├Ą─įŁ└Ē╩ŪŻ¼į┌═┌Š“ÖC(j©®)╠Äė┌═¼ę╗╬╗ų├Ģr(sh©¬)����Ż¼═©▀^ėŗ(j©¼)╦ŃįŁĄž├µ┼c═┌Š“Ąū▓┐Ą─ā╔┤╬£y┴┐öĄ(sh©┤)ō■(j©┤)ų«▓ŅŻ¼üĒĄ├│÷Å─═┌Š“įŁĄž├µĄĮ═┌Š“Ąū▓┐Ą─╔ŅČ╚�Ż¼▓ó▓╗╩ŪÅ─═ŻÖC(j©®)ŲĮ├µĄĮ═┌Š“Ąū▓┐Ą─╔ŅČ╚ĪŻŻ©╚ńłD6���ĪółD7��ĪółD8�����ĪółD9╦∙╩ŠŻ®��Ż¼łD6╩ŪńPČĘ╠Äė┌įŁĄž├µĄ─é╚(c©©)├µęĢłD���Ż¼łD7╩ŪńPČĘ╠Äė┌įŁĄž├µĄ─±{±éåTęĢĮŪęĢłD���Ż¼┤╦łD’@╩Š┤╦Ģr(sh©¬)┐╠Č╚│▀öĄ(sh©┤)ūų×ķ0Ż╗łD8╩ŪńPČĘ╠Äė┌═┌Š“ūŅĄū▓┐Ą─é╚(c©©)├µęĢłD��Ż¼łD9╩ŪńPČĘ╠Äė┌═┌Š“ūŅĄū▓┐Ą─±{±éåTęĢĮŪęĢłD��Ż¼┤╦łD┤╦Ģr(sh©¬)┐╠Č╚│▀öĄ(sh©┤)ūų×ķ1.3ū¾ėę��Ż¼═©▀^ėŗ(j©¼)╦Ń1.3-0=1.3Š═─▄╦Ń│÷┤╦Ģr(sh©¬)Ą─═┌Š“╔ŅČ╚×ķ1.3├ū�����ĪŻ
Ż©łD6Ż®ńPČĘ╠Äė┌įŁĄž├µĄ─é╚(c©©)├µęĢłD
Ż©łD7Ż®ńPČĘ╠Äė┌įŁĄž├µĄ─±{±éåTęĢĮŪęĢłD
Ż©łD8Ż®ńPČĘ╠Äė┌═┌Š“ūŅĄū▓┐Ą─é╚(c©©)├µęĢłD
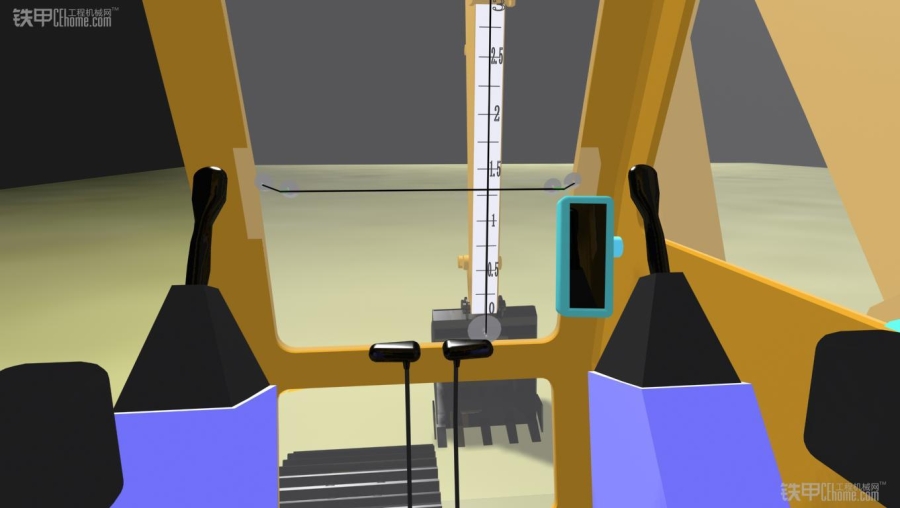
Ż©łD9Ż®ńPČĘ╠Äė┌═┌Š“ūŅĄū▓┐Ą─±{±éåTęĢĮŪęĢłD
▀Ćėąę╗éĆ(g©©)å¢Ņ}Š═╩Ū��Ż¼ńPČĘ═┌Š“░ļÅĮ�����Ż¼┼c£y┴┐Š½Č╚Ą─å¢Ņ}��ĪŻ╚ń╣¹ā╔┤╬£y┴┐Ģr(sh©¬)ńPČĘ▓╗╩Ū╠Äė┌═¼ę╗éĆ(g©©)╬╗ų├Ż¼Š═Ģ■│÷¼F(xi©żn)▓╗═¼Ą─ńPČĘ▀\(y©┤n)äė░ļÅĮ����Ż¼ī¦(d©Żo)ų┬ė░ĒæČ°üĒŠ½Č╚Ż¼ļm╚╗▀@éĆ(g©©)š`▓Ņ┐╔─▄║▄ąĪ�Ż¼─│ą®ū„śI(y©©)Ģr(sh©¬)┐╔ęį║÷┬į�����Ż¼Ą½╚ń╣¹ė÷ĄĮę¬Ū¾Š½Č╚Ė▀Ą─ū„śI(y©©)Ģr(sh©¬)į§├┤▐k─ž��Ż┐ĮŌøQĘĮĘ©ę▓║▄║åå╬���Ż¼Š═į┌į┌£y┴┐Ģr(sh©¬)īóńPČĘŲĮĘ┼��Ż¼²X╝Ō┼÷Ąž����Ż¼Š═─▄ū÷ĄĮ£╩(zh©│n)┤_¤oš`┴╦����Ż¼Ż©╚ńłD10ĪółD11�����ĪółD12ĪółD13�Īó╦∙╩ŠŻ®ĪŻłD10╩ŪńPČĘŲĮĘ┼ė┌įŁĄž├µĄ─é╚(c©©)├µęĢłD�����Ż¼łD11╩ŪńPČĘŲĮĘ┼ė┌įŁĄž├µĄ─±{±éåTęĢĮŪęĢłD����Ż¼┤╦łD’@╩Š┤╦Ģr(sh©¬)┐╠Č╚│▀öĄ(sh©┤)ūų×ķ0.4Ż╗łD12╩ŪńPČĘŲĮĘ┼ė┌═┌Š“ūŅĄū▓┐Ą─é╚(c©©)├µęĢłD�Ż¼łD13╩ŪńPČĘŲĮĘ┼ė┌═┌Š“ūŅĄū▓┐Ą─±{±éåTęĢĮŪęĢłDŻ¼┤╦łD┤╦Ģr(sh©¬)┐╠Č╚│▀öĄ(sh©┤)ūų×ķ1.7ū¾ėę��Ż¼═©▀^ėŗ(j©¼)╦Ń1.7-0.4=1.3Š═─▄╦Ń│÷┤╦Ģr(sh©¬)Ą─═┌Š“╔ŅČ╚×ķ1.3├ū���ĪŻ
Ż©łD10Ż®ńPČĘŲĮĘ┼ė┌įŁĄž├µĄ─é╚(c©©)├µęĢłD
Ż©łD11Ż®ńPČĘŲĮĘ┼ė┌įŁĄž├µĄ─±{±éåTęĢĮŪęĢłD
Ż©łD12Ż®ńPČĘŲĮĘ┼ė┌═┌Š“ūŅĄū▓┐Ą─é╚(c©©)├µęĢłD
Ż©łD13Ż®ńPČĘŲĮĘ┼ė┌═┌Š“ūŅĄū▓┐Ą─±{±éåTęĢĮŪęĢłD
«ö(d©Īng)╚╗▀@╠ūčbų├ę▓ėąą®▓╗ūŃų«╠Ä�Ż¼Š═╩Ūį┌┤_Č©ąĪ▒█┤╣ų▒Ģr(sh©¬)����Ż¼ė╔ė┌┤¾▒█ė░ĒæąĪ▒█Ą─Ė▀Ą═Ū░║¾Ż¼╦∙ęįį┌╠ūėĪžQŽ“Č©╬╗ŠĆ║═ąĪ▒█┐╠Č╚│▀ųąŠĆĢr(sh©¬)�����Ż¼┤¾▒█įĮŽ“Ž┬Ż¼Š═Ģ■ę¬Ū¾±{±éåTĄ──X┤³╬ó╬óŽ“ėę┐┐ę╗³c(di©Żn)�Ż¼äė▒█Ž“╔ŽĢr(sh©¬)Ż¼Š═ąĶꬱ{±éåT─X┤³╬ó╬óŽ“ū¾┐┐ę╗³c(di©Żn)�ĪŻ«ö(d©Īng)╚╗ų╗╩Ū╬óąĪŠÓļxĄ─ö[äėŻ¼▓ó▓╗Ģ■ė░ĒæĄĮ±{±é�����ĪŻ▀Ćėąę╗³c(di©Żn)▓╗ūŃų«╠ÄŠ═╩Ū���Ż¼╩▄ąĪ▒█ķLČ╚Ą─Ž▐ųŲŻ¼Č°Ž▐ųŲ┴╦£y┴┐Ą─ūŅ┤¾╔ŅČ╚���Ż¼ę▓Š═╩Ūšf�����Ż¼ąĪ▒█ėąČÓķLŠ═ų╗─▄£yČÓ╔Ņ�Ż¼ūŅČÓ▀Ć┐╔ęį░čńPČĘĄ─Ė▀Č╚ėŗ(j©¼)╦Ń▀M(j©¼n)╚ź��Ż¼ČÓ┴╦Š═£y▓╗┴╦┴╦����Ż¼20ćŹ╝ēĄ─═┌Š“ÖC(j©®)ūŅ┤¾£y┴┐╔ŅČ╚┤¾Ė┼Š═į┌4├ūČÓ5├ū▓╗ĄĮĄ─śėūė�����Ż¼ąĪ═┌ę▓Š═╩Ūį┌ā╔├ūČÓ3├ū▓╗ĄĮĄ─śėūė�ĪŻ▓╗▀^▀@ę▓ūŃęįæ¬(y©®ng)ĖČę╗░ŃĄ─╣żū„ąĶŪ¾┴╦�����ŻĪ
┤¾╝ęėXĄ├▀@éĆ(g©©)čbų├į§├┤śė���Ż┐Ę┤š²╬ęū„×ķ═┌Š“ÖC(j©®)±{±éåT���Ż¼ėXĄ├┐╔ęįūī±{±éåTī”═┌Š“╔ŅČ╚ėąō■(j©┤)┐╔ę└Ż¼Ėµäe╣└ėŗ(j©¼)╔ŅČ╚Ą─Ģr(sh©¬)┤·���Ż¼ī”═┌Š“ÖC(j©®)±{±é╩ŪėąęµĄ─����ŻĪ

 ┤¾ąĪ▒█/╝ėķL▒█
┤¾ąĪ▒█/╝ėķL▒█  ═┌Š“ÖC(j©®)═┌ČĘ
═┌Š“ÖC(j©®)═┌ČĘ  ę║ē║╝¶/ę║ē║ŃQ
ę║ē║╝¶/ę║ē║ŃQ  ╦╔═┴Ų„
╦╔═┴Ų„ 
 š±äėÕN/┤“śČŽĄ┴ą
š±äėÕN/┤“śČŽĄ┴ą  ŲŲ╦ķÕN
ŲŲ╦ķÕN  ūź─ŠŲ„Ż©▓µ╩Įūźū”Ż®
ūź─ŠŲ„Ż©▓µ╩Įūźū”Ż®  ūźŃQŲ„Ż©├Ę╗©ūźū”Ż®
ūźŃQŲ„Ż©├Ę╗©ūźū”Ż®  ┐ņōQčbų├
┐ņōQčbų├ 







 ┬ō(li©ón)ŽĄ╬ęéā Contact us
┬ō(li©ón)ŽĄ╬ęéā Contact us 
 ╬óą┼Č■ŠS┤a
╬óą┼Č■ŠS┤a  ╬ó▓®Č■ŠS┤a
╬ó▓®Č■ŠS┤a